
北京某某塑料板材有限公司
诚信 / 务实 / 完善 / 快速 / 放心 - 国际品牌
咨询热线: 020-88888888
当前位置: 主页 > 资讯中心 > 公司新闻 » Boost变换器PI参数整定方法总结
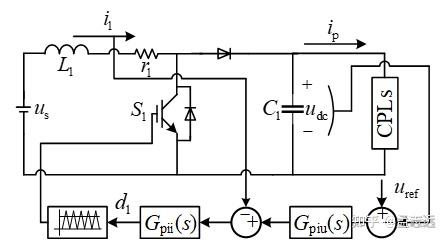
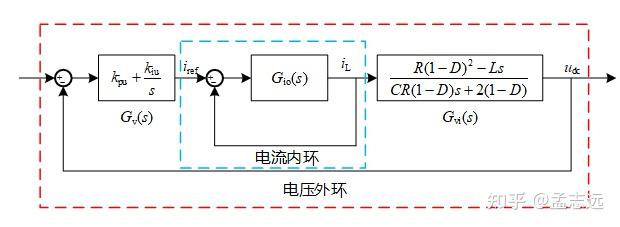
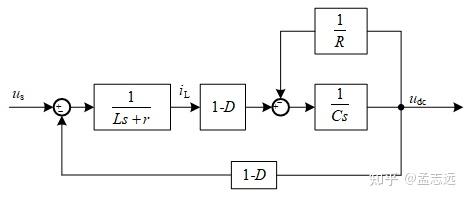
Boost变换器能够实现电压的抬升,广泛应用于储能装置、光伏系统中。最近在研究光伏发电系统,难免少不了与Boost变换器打交道,特别是双闭环控制PI参数的选取,典型的电压电流双闭环控制结构如图1-1所示。因此这一篇文章主要是总结了现有的Boost变换器PI参数整定方法,对各种方法得到的PI参数进行了验证,得到了相应的结论。
Boost变换器的状态空间平均模型可写为
(2-1)
式中, 为变换器的电感电流,L表示电感值,r表示电感上的等效电阻;
表示输入电压,
表示输出电压;C表示输出电容值;R表示负载值。
将输入变量和状态变量分解成直流分量与扰动量之和,进行小扰动分析
(2-2)
式中, 和
分别表示电感电流小扰动量和稳态值,其他参数同理,这里就不过多解释了。
当变换器达到稳态时,可以认为电感电流和电容电压的变化量为0,则令式(2-1)方程左边为0即可求得各状态变量的稳态值,可表示为
(2-3)
将式(2-3)代入式(2-2)中,同时考虑到输入端一般接直流电源或是并一个大电容,因此忽略输入电压的扰动,即认为 为0。此外,在由于扰动量比较小,因此两个小扰动量相乘得到的结果会更小,也可视为0,例如在计算中,形如
的乘积在化简可以视为0。按照上述原则,式(2-2)可以写为
(2-4)
同时,根据式(2-3),可以解出各状态量的稳态解,考虑到电感上的电阻r一般比较小,如果考虑进去则关于占空比D的方程是一个二次方程,不便于求解,并且小信号法与r的关系也不大,因此认为r=0,则稳态解如式(2-5)所示
(2-5)
2.2.1 电流内环PI参数整定
在电流内环中,我们希望控制器输出的变量是占空比,这样和载波比较即可得想要的调制信号,因此需要知道从占空比到电感电流的传递函数。观察式(2-4),除了电感电流和占空比两个扰动变量外,还存在电容电压扰动变量,因此消去电容电压扰动变量即可获得从占空比到电感电流的传递函数。下面给出推导过程,首先将时域转换到s域下,由式(2-4)的第二项可得
(2-6)
将式(2-6)代入式(2-4)的第一项中可得(在小信号法中不再考虑r的影响,认为r=0)
(2-7)
进一步化简可得
(2-8)
将式(2-5)代入到式(2-8)中消去电感电流的稳态解,最终得到从占空比到电感电流的传递函数
(2-8)
接下来就是设计控制器参数,选取最常见的PI控制器作为电流内环的控制器,电流内环结构图如图2-1所示。
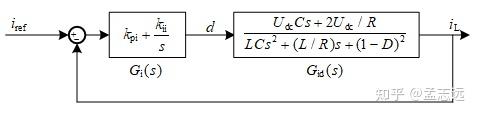
在给出PI控制器参数求取的方法前,先说明一下转折频率与穿越频率的概念,如图2-2所示。
图2-2中,蓝线为转折频率示意曲线,在本文中指的是PI控制器的转折频率,表示的含义为幅频曲线由-20dB线到0dB线间的转折频率,根据自控的知识,PI控制器的转折频率应为 。穿越频率指的是系统的开环截止频率,即幅频曲线中0 dB处对应的频率。
介绍完两种频率的概念,下面进行参数的求取,这里给出两种方法,首先是第一种比较常见的方法:
电流环的开环传递函数可写为
(2-9)
令校正后的电流环开环传递函数,即式(2-9)的穿越频率 为开关频率
的1/20;然后令PI控制器的转折频率
为穿越频率
的1/5。之所以这样选取参数可以通过图2-2来解释,假设橙线为校正前的开环传递函数,显然结合式(2-8)可知,穿越频率位于-20dB线上,如果PI控制器(蓝线)的转折频率位于穿越频率附近或超过穿越频率,那校正后系统的穿越频率可能会位于-40dB线上,且相角裕度很低,甚至出现小于0的情况,会出现失稳现象。至于校正后穿越频率的选取,使其远离开关频率,这样可以对来自开关信号或其他高频的干扰进行滤波。在穿越频率该点,系统的开环传递函数模值应为1,由此可以列出方程
(2-10)
两个未知数,两个方程,求解上式即可得到电流环PI控制器的比例系数和积分系数。
上述方法中穿越频率和转折频率的选取是灵活的,不一定要采取本文的参数,但是要保证基本的原则。在得到相应的参数后,绘制bode图观察系统的稳定裕度即可确定参数的设计是否合理,如不合理,需修改穿越频率和转折频率,或修改电路参数。
可以看出,方法一通过转折频率和穿越频率的选取即可确定出PI控制器的参数,较为简单。但是,方法一无法直接获得系统的相角裕度,如前面所述,需通过bode图来观察,如果相角裕度达不到要求则需修改转折频率和穿越频率,这样比较费时费力。因此引出了方法二:给定穿越频率和相角裕度。
当给定了穿越频率和相角裕度γ后,可以列出下面的方程
(2-11)
将式(2-11)部分展开可得
(2-12)
式中 。
由于穿越频率和相角裕度γ都是确定的,因此从占空比到电感电流的传递函数
,即校正前的电流环开环传递函数的模值和幅角都是确定的,这个可以借助Matlab编程来求,因此这里就不写出具体的表达式了。通过式(2-12),即可获得电流环在给定穿越频率和相角裕度下的PI参数。
2.2.2 电压外环PI参数整定
在获得电流内环的参数后,便可以进行电压外环PI参数的整定工作。根据闭环控制的思想,电压环的输出应为电流环的参考输入,反馈量是电容电压,而电流环的输出是电感电流,因此需要得到从电感电流到电容电压的传递函数,先将boost变换器的小信号模型及稳态解重写于式(2-13)
(2-13)
由(2-13)第一项可得
(2-14)
将其代入(2-13)第二项消去占空比扰动
(2-15)
整理可得
(2-16)
将稳态解代入化简可以得到从电感电流到电容电压的传递函数
(2-17)
选取PI控制器作为电流外环的控制器,电压外环结构图如图2-3所示。
则电压外环的开环传递函数可写为
(2-18)
令校正后的电压环开环传递函数,即式(2-18)的穿越频率 为电流环频率
的1/10;然后令PI控制器的转折频率
为穿越频率
的1/10。由此可以列出方程
(2-19)
两个未知数,两个方程,求解上式即可得到电压环PI控制器的比例系数和积分系数。同样地,若想直接设计电压环的相角裕度,则需给出穿越频率fvc和相角裕度γ,此时的方程可写为
(2-20)
式中 。
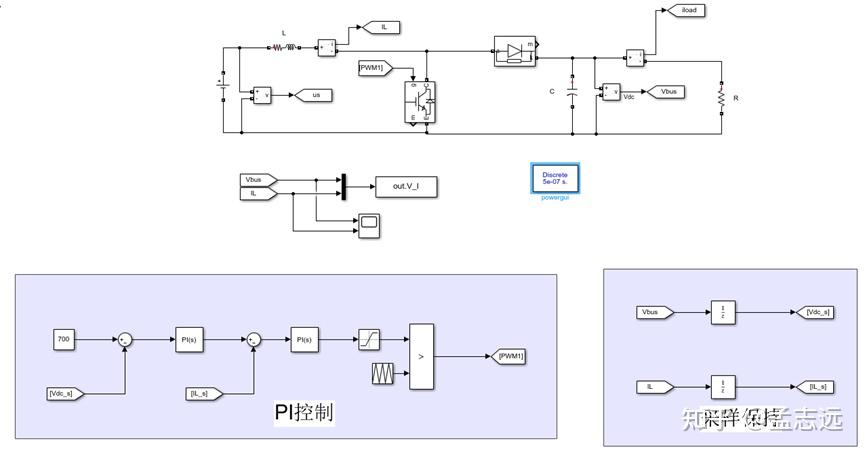
在本节中对上面提到的两种小信号方法进行仿真验证,电路结构如图1-1所示,电路参数如表2-1所示。
表2-1 Boost变换器参数
| 系统参数 | 数值 |
| 电感L | 2 mH |
| 电感电阻r | 0 Ω |
| 输出电容C | 470 μF |
| 参考电压Udc | 700 V |
| 输入电压Us | 400 V |
| 开关频率fs | 20 kHz |
| 负载 | 70Ω |
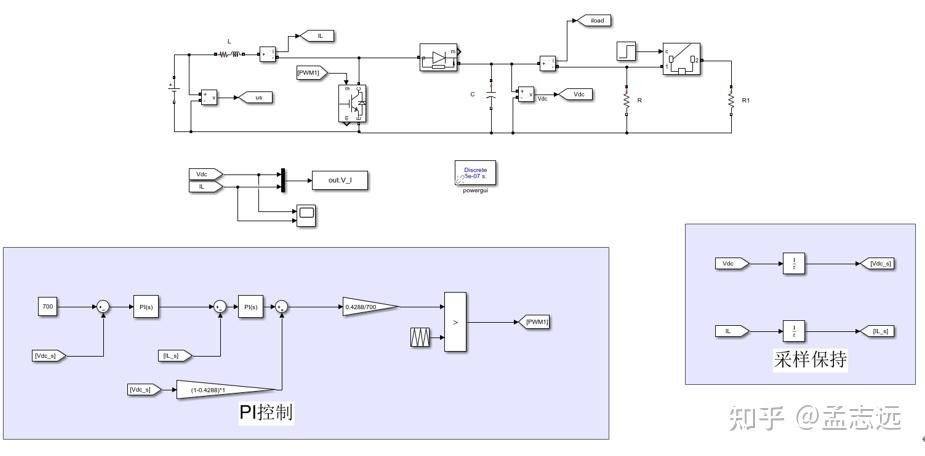
图2-4为Boost变换器Matlab/Simulink的仿真结构图,包括主电路、采样保持、电压电流双闭环和PWM环节图中延时环节(Unit Delay)的采样时间为一个开关周期,即50μs,电容初始电压设为700 V。
首先利用方法一,确定PI控制器转折频率和校正后系统的穿越频率,令校正后的电流环开环传递函数的穿越频率 为开关频率
的1/20,也就是1 kHz;然后令PI控制器的转折频率
为穿越频率
的1/5,也就是200 Hz。然后根据前面得到的式(2-10),现写至式(2-21),即可求得电流环的PI参数。
(2-21)
求得电流环的参数后,令校正后的电压环开环传递函数的穿越频率 为电流环穿越频率
的1/10,也就时100 Hz;然后令PI控制器的转折频率
为穿越频率
的1/10,也就是10 Hz,由此列出的方程如式(2-22)所示
(2-22)
最终得到电压环和电流环的PI参数为
(2-23)
对于方法二:给定穿越频率和相角裕度。一般来说,相角裕度在30°至60°为宜,可以先选一个折中的数,然后再慢慢调试,本文选取的电压环和电流环相角裕度γ均为45°,令校正后的电流环开环传递函数的穿越频率fic为开关频率 的1/20,也就是1 kHz;令校正后的电压环开环传递函数的穿越频率
为电流环穿越频率
的1/10,也就时100 Hz。由此列出的方程如式(2-24)所示
(2-24)
最终得到电压环和电流环的PI参数为
(2-25)
两种方法求解PI参数的Matlab代码如下所示:
clear;
close all;
syms kpi kii kpu kiu %定义要求解的符号变量
Vs=415; C=470e-6; L=2e-3; R=70; Vdc=700;
fs=20e3;
fcc=fs/20;%电流环穿越频率
wcc=2*pi*fcc;
D=1-Vs/Vdc;
Dp=1-D;
gama=45;
s=wcc*1j;
%Gi_PI=(kpi*s+kii)/s;%电流环PI控制器
Gid=(Vdc*C*s+2*Vdc/R)/((L*C*s^2+(L/R)*s+Dp^2));%从占空比到电感电流的传递函数
abs_Gi_PI=sqrt((kpi*wcc)^2+kii^2)/wcc;%PI控制器模值
ang_Gi_PI=atan(kpi*wcc/kii)-pi/2;%PI控制器相角
%Gid所有变量都知道,因此可以直接用abs和angle函数求模值和相角
abs_Gid=abs(Gid);
ang_Gid=angle(Gid);
%求解kpi与kii 法一:给定PI控制器的转折频率
fcc_pi=fcc/5;%电流环PI控制器的转折频率
wcc_pi=2*pi*fcc_pi;
equ_i=[abs_Gi_PI*abs_Gid==1,kii/kpi==wcc_pi];
PI_i=vpasolve(equ_i,[kpi,kii],[0,1e5;0,1e5]);
% %求解kpi与kii 法二:给定相角裕度
% equ_i=[abs_Gi_PI*abs_Gid==1,ang_Gi_PI+ang_Gid==-(180-gama)/(180/pi)];
% PI_i=vpasolve(equ_i,[kpi,kii]);
s=tf('s');
kpi=double(PI_i.kpi);%符号变量转成double型变量
kii=double(PI_i.kii);%符号变量转成double型变量
Gi_PI=(kpi*s+kii)/s;%电流环PI控制器
Gid=(Vdc*C*s+2*Vdc/R)/((L*C*s^2+(L/R)*s+Dp^2));%从占空比到电感电流的传递函数
Gio=Gi_PI*Gid;
figure(1);
bode(Gi_PI);
hold on
bode(Gid);
bode(Gio);
title('电流环bode图')
legend('PI传递函数','补偿前','补偿后');
set(gcf,'unit','centimeters','position',[20 10 12 10]);
fvc=fcc/10;%电压环穿越频率
wvc=2*pi*fvc;
s=wvc*1j;
gama=45;
Gi_PI=(kpi*s+kii)/s;%电流环PI控制器
Gid=(Vdc*C*s+2*Vdc/R)/((L*C*s^2+(L/R)*s+(1-D)^2));%从占空比到电感电流的传递函数
Gic=Gi_PI*Gid/(1+Gi_PI*Gid);%电流环闭环传递函数
%Gv_PI=(kpu*s+kiu)/s;%电压环PI控制器
Gvi=(Dp^2*R-L*s)/(Dp*R*C*s+2*Dp);%从电感电流到电容电压的传递函数
Gv=Gic*Gvi;%除去PI控制器的电压环开环传递函数,即校正前的电压环开环传递函数
%Gv所有变量都知道,因此可以直接用abs和angle函数求模值和相角
abs_Gv=abs(Gv);
ang_Gv=angle(Gv);
%电压环PI控制器模值与相角
abs_Gv_PI=sqrt((kpu*wvc)^2+kiu^2)/wvc;%PI控制器模值
ang_Gv_PI=atan(kpu*wvc/kiu)-pi/2;%PI控制器相角
%求解kpu与kiu 法一:给定PI控制器的转折频率
fvc_pi=fvc/10;%PI控制器转折频率
wvc_pi=2*pi*fvc_pi;
equ_v=[abs_Gv_PI*abs_Gv==1,kiu/kpu==wvc_pi];
PI_v=vpasolve(equ_v,[kpu,kiu],[0,1e5;0,1e5]);
% %求解kpu与kiu 法二:给定相角裕度
% equ_v=[abs_Gv_PI*abs_Gv==1,ang_Gv_PI+ang_Gv==-(180-gama)/(180/pi)];
% PI_v=vpasolve(equ_v,[kpu,kiu]);
%绘制bode图
s=tf('s');
kpu=double(PI_v.kpu);%符号变量转成double型变量
kiu=double(PI_v.kiu);%符号变量转成double型变量
Gi_PI=(kpi*s+kii)/s;%电流环PI控制器
Gid=(Vdc*C*s+2*Vdc/R)/((L*C*s^2+(L/R)*s+(1-D)^2));%从占空比到电感电流的传递函数
Gic=Gi_PI*Gid/(1+Gi_PI*Gid);%电流环闭环传递函数
Gv_PI=(kpu*s+kiu)/s;%电压环PI控制器
Gvi=(Dp^2*R-L*s)/(Dp*R*C*s+2*Dp);%从电感电流到电容电压的传递函数
Gv=Gic*Gvi;%校正前的电压环开环传递函数
Gvo=Gv_PI*Gv;%校正后的电压环开环传递函数
figure(2);
bode(Gv_PI);%电流环开环传递函数
hold on
bode(Gv);
bode(Gvo);
legend('PI传递函数','补偿前','补偿后');
title('电压环bode图');
set(gcf,'unit','centimeters','position',[30 10 12 10]);
两种方法得到的系统Bode图如图2-5所示。
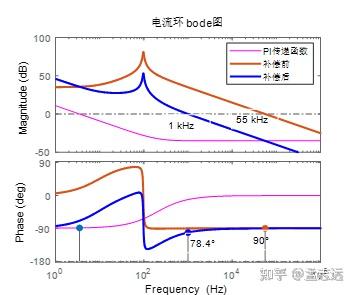
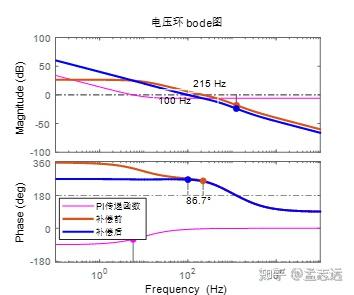
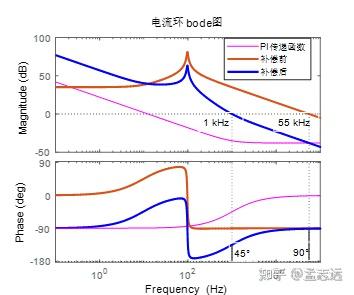
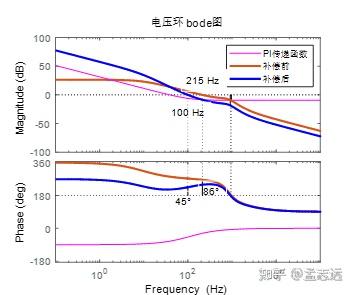
从图2-5可以看出,两种方法得到的PI参数均能使校正(补偿)后的系统达到我们想要的截止频率或相角裕度,由此证明了所提方法的有效性。图2-6进一步给出了两种方法下的仿真结果:
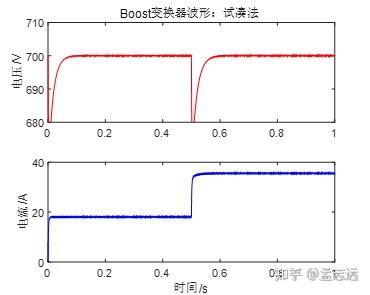
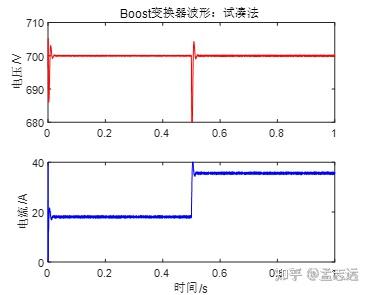
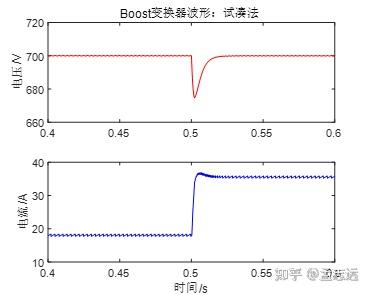
图2-6中,电压指的是电容电压,电流指的是电感电流,在0.5 s时给变换器增加负载。可以看出,方法一(给定截止频率和转折频率)相比于方法二(给定截止频率和相角裕度),电压和电流的动态响应基本上没有超调。尽管两种方法得到的系统开环截止频率都一样,但方法二的调节时间更短,超调更大。
至此,已经介绍及验证完基于小信号的Boost变换器PI参数整定方法。从整体过程来看,小信号法的思想在于局部线性化,其对应的是稳态点附近的稳定性问题。对于图2-6,在0.5 s处负载由70 Ω增加至额定值35 Ω,电容电压和电感电流均发生了比较大的变化,那么我们基于“小信号—稳态点”的这一前提是否还能得到满足?其实不少论文在获得PI参数后也会像题主一样通过改变电压、负载来验证所得参数的合理性,但却忽略了小信号模型的适用条件,有点人云亦云的意思了。事实上,当一些变量(电感电流、电容电压等)相对于原来的稳态点大范围变化时,利用上述方法得到的PI参数变化不会很大,基本上不会出现系统失稳的情况,感觉这样会使人对自己设计的参数更加自信了,因而忽略了小信号方法的前提条件。想对Boost变换器小信号的局限性作进一步了解的强烈推荐b站木修于淋Up主的视频:【38】boost变换器的小信号模型的可用性分析_哔哩哔哩_bilibili。下面介绍的Boost变换器大信号法PI参数整定也是从该UP主的视频中总结下来的,如涉及侵权,题主会立即删除掉该部分。
这里的大信号法我个人的理解是从状态方程的角度出发得到系统的传递函数,不需要将状态方程进行小信号分解。式(2-1)为Boost变化器状态空间平均模型,假设占空比d为稳态值D(这里也有点小信号的意思,但不这么做就无法得到传递函数),这样得到的状态方程如式(3-1)所示。
(3-1)
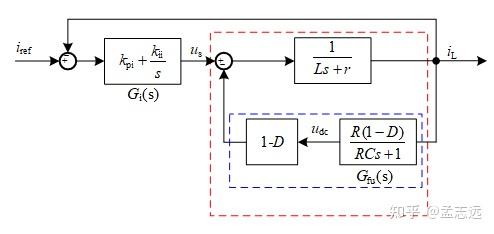
根据式(3-1)可以得到系统的结构图,如图3-1所示。下面将以该结构图进行参数设计。
3.1.1 电流内环参数整定
如前文所述,设计电流内环时需要知道从占空比到电感电流的传递函数,但那是针对小信号的方法来说的,对于图3-1所示的结构,显然电流环的输出应为输入电压,即us。由此可以获得电流环的结构图,如图3-2所示。
这里可能会有人提出疑问:电流环PI控制器的输出是输入电压 ,如前文所言,
不应该是个常数么?这里是把
当成了一个变量,大家不要拘泥于“电流环的输出是占空比”这一思想。题主在学电拖和新能源这两门课的时候被一个问题困扰了多年,那就是为什么电压环PI控制器的输出要是电流参考,电流环PI控制器的输出要是占空比或是整流/逆变系统里的
和
?后来才想明白,其实控制器的输出是什么取决于要设计的系统结构图,以本文的Boost变换器为例,利用小信号的分析方法推出从占空比到电感电流的传递函数,那么PI控制器的输出就是占空比;而图3-2中可以得到从输入电压到电感电流的传递函数,那么PI控制器的输出就是输入电压
。另外,PI控制器只是众多控制器的一种,在自控课本上提供了其他类型的控制器,如滞后校正、超前校正、比例-微分校正等,这些都可以作为控制器,控制器只是起了一个“校正”的作用,只是PI控制器可以提升系统的型别,增强抗干扰能力,且参数较少,调节方便,因而取得了较为广泛的应用。在题主本科学的电拖课本上对PI控制器的描述就比较文字化了,就是描述比例和积分的角度去展示给定与反馈间的关系,还附上了大量的图片,其实这样反倒容易误导学生,倒不如直接从自控原理的角度去解释。
说了这么多,再回到图3-2,PI控制器输出后,在仿真中只需乘以D/
即可得到占空比,当然,这里的稳态占空比D需要事先计算出来。观察图3-2,如果接着往下进行,那就是写出电流环的开环传递函数,然后仍然像小信号法一样给出穿越频率、转折频率或相角裕度,最后求得PI参数。主要是因为图3-2用红框圈起来的部分化简后是一个二阶系统,和小信号法得到的没什么区别,如果没有引入其他环节,后面的步骤也就差不多,因此这里就不再推导这种情况了。
再次观察图3-2,如果把蓝框的部分给拿掉,那么电流环是不是就很简洁了,并且剩下的部分会不会有点眼熟?剩下的部分和三相PWM整流/逆变器电流环的结构是一样的,大家可以看一下我之前写的这一篇关于三相PWM整流PI参数设计的文章:三相PWM整流器PI参数整定方法分析与总结 - 知乎 (zhihu.com)。如果我们能通过设计消去蓝框的部分,那么电流内环PI参数的整定方法就可以用这篇文章里的,不光是电流内环,电压外环的PI参数整定也是如此。
那么接下来的问题就是如何消去蓝框的部分,可以看出,蓝框的部分是一个反馈通道,反馈的是 ,那么我们只要再引入一个反馈量
也叠加在PI控制器的输出
上就能够消去蓝框的部分了,这实际上是一种前馈校正。根据上述思想,可以得到电流环的结构图,如图3-3所示。
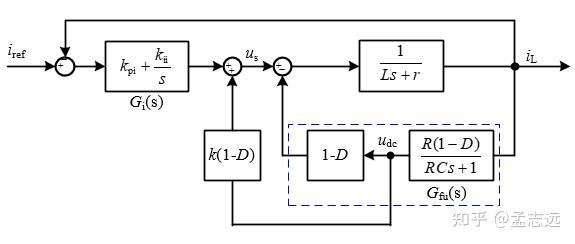
图3-3中,k表示前馈系数,取1时即可消去蓝框部分,由此得到的电流环结构图如图3-4所示。
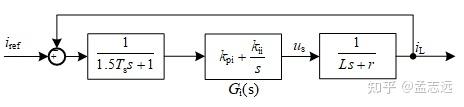
图3-4中,PI控制器前的环节表示由采样和PWM带来的延时环节, 表示一个开关周期,之所以加上这个延时环节,是为了和PWM整流器的电流内环保持一致,当然实际上也是存在这个环节的,关于电流内环PI控制器参数的计算,大家去看我前面提到的的那篇文章吧,里面介绍了两种方法:“陈伯时”法和带宽法,都有详细的推导与验证,在这里直接给出最终的计算公式:
对于陈伯时法,电流内环PI参数的计算公式为
(3-2)
对于带宽法(这里的带宽指的是电流环开环传递函数的截止频率):电流内环PI参数的计算公式为
(3-3)
式中, 表示电流环的开环传递函数截止频率,由自己给定;r为电感上的电阻,此时不应忽略。
这里补充一句,当考虑电感上的电阻r后,稳态占空比D会随着负载的变化而变化,而我们在仿真中用的占空比是一个定值,但这并不影响最终的控制效果,主要原因有两点:一是电感上的电阻对D的影响是很小的,二是有PI控制器的作用能够及时将这个误差给减弱。
3.1.2 电压外环参数整定
Boost变换器电压环结构如图3-5所示
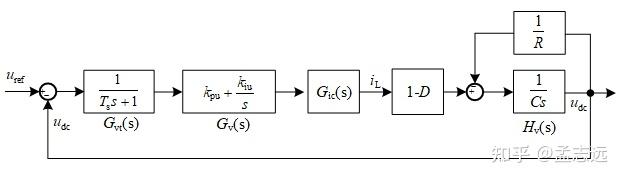
图3-5中, 表示采样延迟环节,
表示PI控制器,
表示电流环闭环传递函数。同样地,这个结构与PWM整流器电压外环相似,为什么是相似,图3-6给出了PWM整流器电压外环结构图。
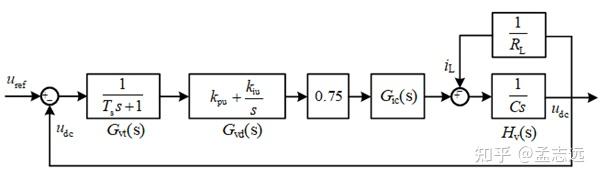
对比图3-5和3-6可以看出,两者区别在于前向通道上的常数项一个是(1-D),一个是0.75,因而最终的表达式会有所不同。在这里直接给出最终的计算公式:
对于“陈伯时”法,电压外环PI参数的计算公式为
(3-4)
对于带宽法,电压外环PI参数的计算公式为
(3-5)
式中, 表示电压环的开环传递函数截止频率,由自己给定;式(3-4)中的h与式(3-5)中的h含义不同,式(3-5)中,h取1.2;
。上述变量的含义在前面提到文章中均有解释,感兴趣的可以自行查看。
本节对上面提到的两种大信号分析方法进行验证,分别是“陈伯时”法和带宽法,电路参数令电感上的电阻为0.01 Ω,其余参数与表2-1相同,此时可以根据式(2-3)计算出稳态占空比D为0.4288,则Boost变换器的整体结构为
3.3.1 “陈伯时”法仿真验证
根据“陈伯时”法得到的电压环和电流环PI参数计算式如式(3-6)所示
(3-6)
将相关参数代入式(3-6)中可以得到PI参数
(3-7)
下面进行仿真验证,图3-7中,负载电阻为70 Ω,在0.5 s时并入70 Ω电阻,电容电压和电感电流如图3-8所示。
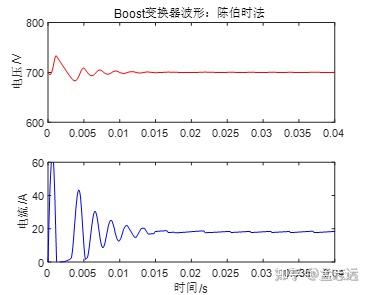
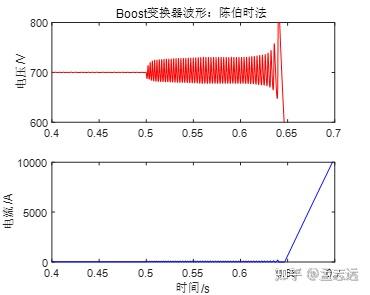
从图3-8中可以看出,利用求得的PI参数,Boost变换器在一开始可以正常运行,且响应速度较快,但在加载后系统失去稳定,与图2-6小信号法相比稳定性能较差。对于这一种现象的解释在前面提到的那篇文章里也有说明,这里就再次解释一遍。现分别绘制电流环和电压环的开环传递函数Bode图,如图3-9所示。
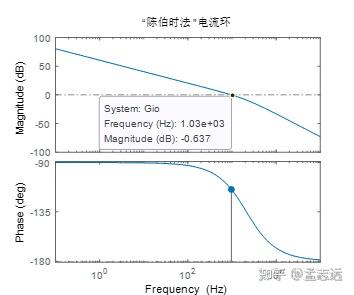
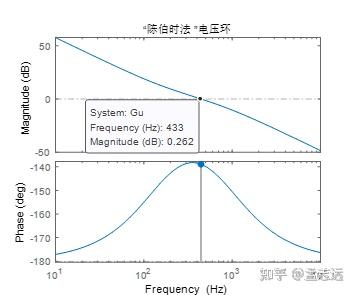
从图3-9可以看出,电流环和电压环相位裕度和截止频率足够,均表示系统是稳定的,但是仿真结果并不是这样。这里我个人对这种现象的解释是:电流环和电压环的带宽(截止频率)相差过小。我个人对看过文献的总结是:电流环的带宽一般不超过开关频率的1/10,对于本场景来说,即不超过2kHz;而电压环带宽不超过2倍的电网频率,也就是100Hz,当然,这是针对整流/逆变器来说的,但反映的问题都是一致的。图3-9所展示的电压环截止频率为400 Hz,与电流环的1000 Hz相差较小,并且我们控制的是直流量,有了电流内环,电压环没必要设置得过高。图3-8和图3-9再次证明了“陈伯时”法的一个局限性,那就是对电压环和电流环截止频率间的关系考虑的较少,尽管可以通过修改变量h来修改电压环的截止频率,但效果不是很好,大家可以自行尝试一下。
3.3.2 带宽法仿真验证
根据带宽法得到的电压环和电流环PI参数计算式如式(3-8)所示
(3-8)
取电流环截止频率 ,电压环截止频率
,h=1.2,将相关参数代入式(3-8)中可以得到PI参数
(3-9)
下面进行仿真验证,电容电压和电感电流如图3-10所示。
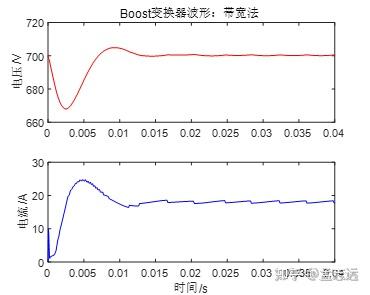
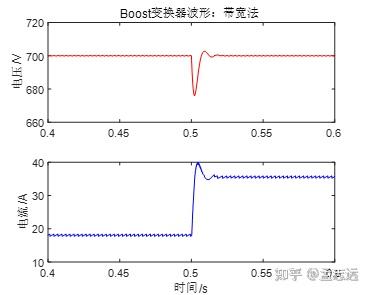
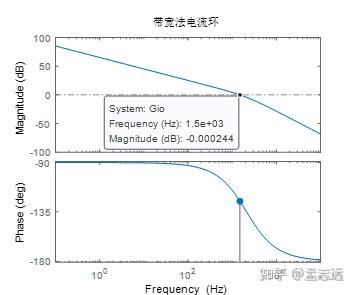
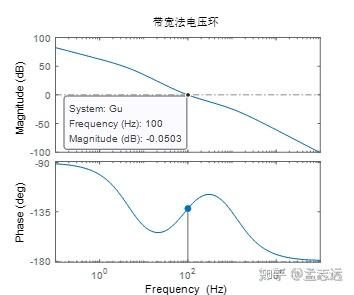
从图3-10可以看出,电压达到了给定值700 V,且波形质量良好,在负载突增后也能保持稳定,证明了带宽法的合理性与有效性。电流环和电压环的开环传递函数Bode图,如图3-11所示,电流环截止频率为1500 Hz,电压环截止频率为100 Hz,与设定值一样,证明了式(3-8)的推导是正确的,也说明了Boost变换器的稳定性与电压环和电流环的带宽有关。
在这里附上“陈伯时”法和带宽法计算PI参数的Matlab代码:
clear;
close all
syms D
s=tf('s');
Vs=400; C=470e-6; L=2e-3; R=70; Vdc=700;
r=0.01;
fs=20e3;
Ts=1/fs;
w_i=1500*2*pi;
w_v=100*2*pi;
h=5;
equ_D=(R*(1-D)^2*Vdc-Vs*R*(1-D)+r*Vdc==0);
solu_D=vpasolve(equ_D,D,[0,0.95]);
D=double(solu_D);
% %陈伯时法
% taoi=L/r;
% kpi=r*taoi/(3*Ts);
% kii=kpi/taoi;
%带宽法
kpi=w_i*L.*sqrt((w_i.*1.5*Ts).^2+1);
kii=kpi*r/L;
Gio=(kpi+kii/s)*(1/(1.5*Ts*s+1))*(1/(L*s+r));
figure(1);
bode(Gio);
title('带宽法电流环');
set(gcf,'unit','centimeters','position',[20 10 12 10]);
Gio_simplify=1/((L/kpi+Ts)*s+1);
% %电压环陈伯时法
% Tev=L/kpi+Ts;
% taou=h*Tev;
% kpu=C*(h+1)/(2*(1-D)*h*Tev);
% kiu=kpu/taou;
%电压环带宽法,选定电压环带宽
Dd=1;%这个变量没什么用,直接忽略
h=1.2;
Tev=L/kpi+Ts;
kiu=(1/(1-D))*sqrt((w_v^2*(w_v^2*Tev^2+1)*(R^2*C^2*w_v^2+1))/((h*h+1)*Dd*Dd*R*R));
kpu=h*kiu/w_v;
Gu=(kpu+kiu/s)*Gio_simplify*(1-D)*(R/(C*R*s+1));
figure(2);
bode(Gu);
title('带宽法电压环');
set(gcf,'unit','centimeters','position',[30 10 12 10]);
除了“陈伯时”法和带宽法,前面提到的文章里还提到了另一种方法:试凑法,该方法的思路是直接绘制电压环和电流环的开环频率特性曲线,然后观察PI控制器中的比例系数和积分系数对系统截止频率和相角裕度的影响,进而选取PI参数,在这里也一并写上吧。为简化分析过程,此处忽略延迟环节带来的影响,则电流环和电压环的开环传递函数可写为
(3-10)
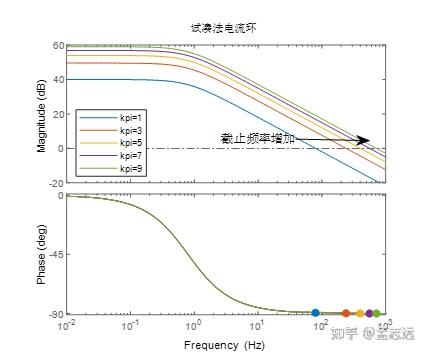
首先试凑电流环的PI参数,先令 =0,观察在不同
下,电流环的开环频率特性,如图3-12所示。可以看出,随着
的增加,电流环的截止频率也增加。
现令 =13,观察在不同kii下,电流环的开环频率特性,如图3-13所示。可以看出,随着kii的增加,电流环的截止频率基本上不发生变化,但是由于引入了积分系数,系统的低频增益提高,有利于增强系统的抗扰能力。
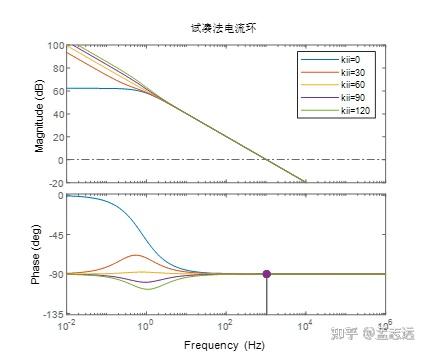
根据图3-12和图3-13的规律,经过调试,最终得到的参数为kpi=13,kii=120,此时电流环的截止频率约为1 kHz。
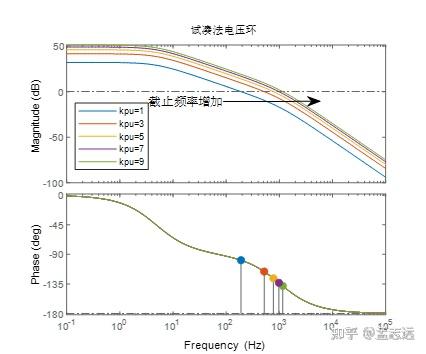
接着试凑电压环的PI参数,先令 =0,观察在不同
下,电压环的开环频率特性,如图3-14所示,随着
的增加,电压环的截止频率也增加。从图中还可以看出,当电压环比例系数大于1时,其截止频率变得很高,当比例系数为3时截止频率已经到了500 Hz,因此电压环的比例系数不能选得过大。
我们先令=0.5,观察在不同
下,电压环的开环频率特性,如图3-15所示。可以看出,随着
的增加,电压环的截止频率增加发生变化,同电流环一样由于引入了积分系数,系统的低频增益提高,有利于增强系统的抗扰能力。校正前(
=0.5,
=0,图中蓝线)电压环开环传递函数不存在截止频率,引入积分环节后出现了截止频率,能够保证系统的稳定性与快速响应。
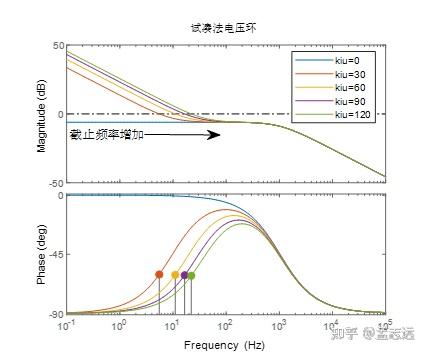
经过调试,最终得到的参数为 =0.5,
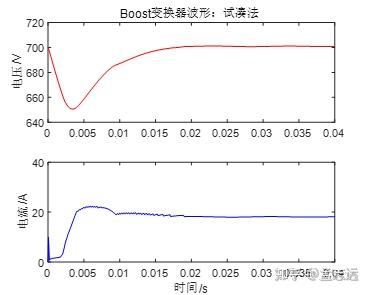
=100,此时电压环的截止频率约为100 Hz。将上述参数(
=13,
=120;
=0.5,
=110)代入到仿真中,仿真结果如图4-11所示。可以看出,电压和电流波形质量良好,相比于图3-10中带宽法的结果电压电流超调量减少,调节时间增加。
在本章中对本文提到的几种方法进行总结,为了便于描述,将每种方法的名称、思想及效果列至表4-1。
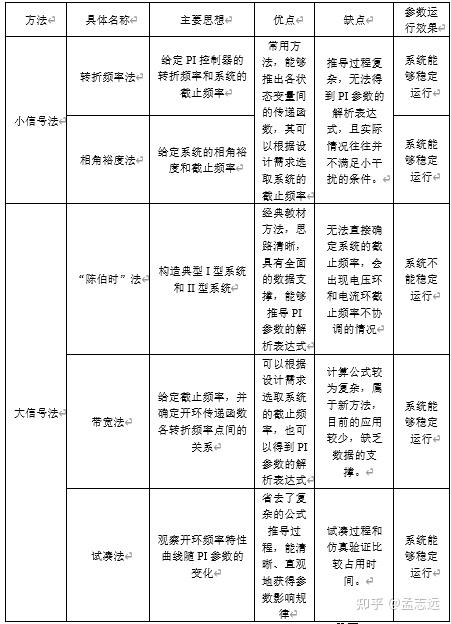
对本文的内容进行总结,可得到以下几点结论:
(1)Boost变换器在进行PI参数整定时需考虑电压环与电流环的截止频率,一般来说,电流环的截止频率不要超过开关频率的1/10,电压环的截止频率要尽可能小于电流环截止频率,可以取电流环截止频率的1/10。
(2)基于小信号的Boost变换器PI参数整定方法虽然可能不满足“小干扰”这一条件,但设计出的参数也具有可行性。基于大信号的Boost变换器PI参数整定方法中,“陈伯时”法PI参数整定得到的电流环带宽符合设计要求,电压环带宽与要求相差较大;基于带宽法的PI参数整定得到的电压环和电流环带宽均能达到给定值,满足设计要求。
(3)电压环和电流环的PI控制器比例系数影响各自的截止频率,积分系数影响低频增益,在电压环中也影响截止频率,适量增大积分系数有利于增强系统的抗扰能力。
针对第3个结论,在PWM整流器中,PI控制器的积分系数影响低频增益,对截止频率几乎没影响。这主要是由电路参数影响的,在不同的系统中,PI控制器的积分系数对系统的影响程度也会不同,因此要具体问题具体分析。创作不易,麻烦大家点个赞吧!







